要了解一手最新的科技前沿, 研究以及阅读文献的能力必不可少. 最近在github上刷到了research_tao这个仓库by刘知远副教授, 其中有一篇文章讲的是如何阅读文献. 阅读到其中一章的时候激发了思考自己阅读文献的方式是否可以再提升一步. 因此花了点时间总结了几位不同老师关于如何阅读论文(主要是计算机与人工智能方向)的材料, 希望对你有所帮助.
Note: 几位老师都提到了如何选择材料, 但不是这篇文章的重点. 因此这里不会提及应该读什么.
目录
阅读论文的方法
清华(刘知远)
在research_tao里, 刘老师主要谈到的是论文的阅读顺序.
阅读论文也不必需要每篇都从头到尾看完. 一篇学术论文通常包括以下结构, 我们用序号来标记建议的阅读顺序:
- 题目(1)
- 摘要(2)
- 正文: 导论(3), 相关工作(6), 本文工作(5), 实验结果(4), 结论(7)
- 参考文献(6)
- 附录
按照这个顺序, 基本在读完题目和摘要后, 大致可以判断这篇论文与自己研究课题的相关性, 然后就可以决定是否要精读导论和实验结果判断学术价值, 是否阅读本文工作了解方法细节. 此外, 如果希望了解相关工作和未来工作, 则可以有针对性地阅读“相关工作”和“结论”等部分.
Johns Hopkins Univeristy(Jason Eisner)
Jason Eisner提出Multi-pass reading.
Multi-pass reading的过程:
- First pass: 大概浏览论文, 了解论文的主要脉络(解决的问题, 以及点子). 限制自己阅读每页的时间. 如果论文值得阅读的话, 开始Second pass.
- Second pass: 在Second pass中, 不需要仔细阅读每篇论文. 提出问题并且回答他们(ask yourself dumb questions and answer them). 至少弄清楚论文的动机(Motivation), 原理(Mathematics and algorithms). 以及实验过程(Experiments).
此外, 在使用Multi-pass reading的要做的事. 需要一边阅读论文一边写笔记(Write as you read). 记录细节(Low-level notes)与框架(High-level notes).
细节(Low-level notes)包括以下部分:
- 用自己的话复述在论文中不明白的要点
- 补充缺失的细节(假设, 代数步骤, 证明, 伪代码)
- 注释数学对象及其类型
- 类比具体的例子去复述作者的点子以及作者遇到的问题
- 与已知的其他方法和问题联系起来
- 提出原文未说明的地方或原文存在不合理的问题
- 挑战论文的主张或方法
- 想出应该做的后续工作
框架(High-level notes)包括以下部分:
- 总结你感兴趣的内容, 与其他论文进行对比, 并记录你自己的问题和对未来工作的想法. 写下这些摘要会在阅读论文时给你一个目标, 并且这些笔记将来会对你有用.
- 用自己的话复述点子, 确保以后再读这篇文章的时候可以快速重建概念. 花时间在难的部分(公式推导, 算法). 而不是在简单的部分.
原文虽然说是Multi-pass, 但是提到了Second-pass之后就没有继续往下提及了. 不过可以从原文发现后续pass应该做什么的蛛丝马迹, 这里引用原文来表达Multi-pass reading核心思想:
Practice the ability to decode the entire paper —as if you were reviewing it critically and trying to catch any errors, sloppy thinking, or incompleteness. This will sharpen your critical thinking. You will want to turn this practiced critical eye on yourself as you plan, execute, and write up your own research.
通过解构论文提升自己评判性思考的能力, 再将这种能力转换到自己的研究上面. 因此假如需要有后续pass的话, 应该不断的去提炼点子直到能够解构整篇文章.
Univeristy Of Waterloo(Srinivasan Keshav)
Srinivasan Keshav提出three-pass method.
-
First-pass:
- 目的: 抓住论文主要的点子.
- 时间: 5分钟左右
- 做什么:
- 读标题, 摘要, 以及介绍
- 读每一节和每一小节的标题
- 读结论
- 看引用
- 最后回答五个问题(five C's):
- 类别(Category): 这篇文章的类型是什么?
- 内容(Content): 这篇文章与什么内容有关? 理论基础是什么?
- 准确度(Correctness): 文章的假设是否成立?
- 贡献(Contributions): 这篇文章主要的贡献是什么?
- 清晰程度(Clarity): 这篇文章是否清晰的表达点子?
-
Second-pass:
- 目的: 抓住论文主要的内容
- 时间: 1小时左右
- 做什么:
- 仔细读文章所附带的图片以及其他陈述信息
- 将未读过的有相关性参考文献加入阅读列表当中
-
Third-pass:
- 目的: 彻底理解论文的细节
- 时间: 4到5个小时对于初学者, 1小时对于有经验的人
- 做什么:
- 思考与作者处于同样的假设并且复现实验的情况下, 你会如何呈现一个点子, 并与作者的点子进行对比.
Harvard University(Michael Mitzenmacher)
这里选择的材料是CS222-Michael Mitzenmacher的讲义:
- 批判性思考: 通过提出合适的问题去批判性地思考论文, 例如: 如果作者在解决问题, 那么作者解决的问题是正确的问题吗? 是否有更简单的方法作者没有考虑到? 作者提供的方法有什么局限性? 假设是否合理? 逻辑是否合理? 作者对于文中的图表是否是合理的解释数据?
- 创造性阅读: 能否解构论文并且重建这篇文章? 这篇文章好在哪里? 这些点子是否有其他扩展以及应用是作者没有考虑到的? 点子能够更加泛化? 这些提升是否能让结果有明显的提升? 如果你要从这篇文章开始做研究, 你能够做什么?
- 阅读的时候做笔记: 在第一篇读完这篇文章之后, 尝试用一到两句话去总结这篇文章. 如果可以的话, 将这篇文章与相关工作进行比较.
Carnegie Mellon University(Aaditya Ramdas)
这里选用了How to I read research papers-Aaditya Ramdas的ppt讲稿, Aaditya Ramdas讲述了自己阅读论文方法不断迭代的过程.
- 阅读论文的目的:
- 直接从作者身上学习, 避免信息加工.
- 作者在旧问题上有新点子
- 方法:
- first-pass(5到30分钟):
- 阅读材料:
- 摘要, 问题定义, 主要的理论, 讨论
- 回答:
- 什么问题被解决了?
- 大致描述一下什么有意思的点子?
- 为什么主要的观点是这样(至少用英文, 最好能用数学公式)?
- 阅读材料:
- second-pass(30分钟到2小时):
- 阅读材料:
- 例子, 公式, 定理, 证明
- 回答:
- 过去的方法面临什么问题? 这篇文章是如何解决的?
- 什么是最简单的基准线? 在什么指标上这种方法更好?
- 有哪些与之相关的问题并且为什么论文的想法还没用应用到上面去?
- 方法能否应用到没被考虑的问题上?
- 什么是主要的点子并且能否对以后有所帮助的?
- 阅读材料:
- third-pass(几天/周):
- 阅读材料:
- 附录, 参考文献, 相关工作, 推论,定理, 证明
- 回答:
- 文中的公式/理论是如何被证明的?
- 是否能够从头复现实现结果?
- 如果不能, 是否有关键信息被忽略了? 额外的假设是否能够让复现更简单?
- 是否能够用简单的工具简化证明? 能否用不同的方法证明?
- 阅读材料:
- first-pass(5到30分钟):
总结
其实上面提到的方法不仅仅适用于阅读论文, 只不过论文是一种结构化的信息材料. 通过其他信息材料(视频, 文章)学习新知识都可以采取类似的方法. 以记笔记的方式让自己与阅读的材料互动. 提出问题并且回答问题, 推动自己去理解文章. 并且以问题为导向学习让自己处于能够实验的环境之中. 通过复述以及写作总结自己的理解, 帮助自己消新知识. 读完这篇材料后, 不妨花点时间用一两句话总结一下这篇文章的主要观点是什么.
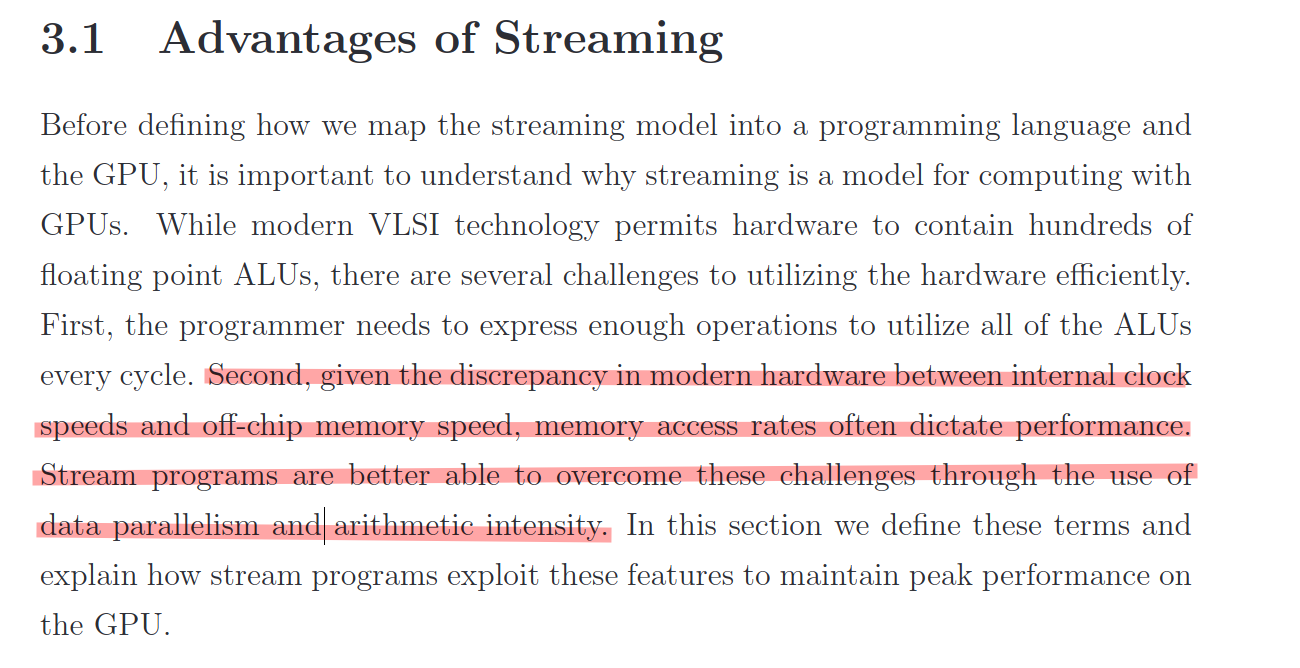
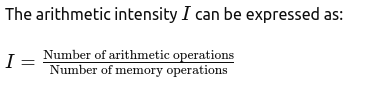 Arithmetic intensity指的是运算指令(add, mul..)与内存操作(load, store..)的比例.
Arithmetic intensity指的是运算指令(add, mul..)与内存操作(load, store..)的比例.